


Wir waren immer etwas genervt, wenn wir Propeller und Antriebe an den Pylons verändert hatten, dass wir nur rein subjektiv beurteilen konnten ob das Modell wirklich schneller geworden ist. Selbst bei Messungen per Doppler-Effekt und Radarpistole waren die Unterschiede oft nicht eindeutig messbar.
Das musste geändert werden… Also wurde ein F5D Flipper mit Datenlogger und Sensoren ausgestattet, damit das Raten endlich ein Ende hat!
Entschieden haben wir uns für den UniLog von Stefan Merz, den man gleichzeitig auch als Energielimiter im F5D und Limited-Modell einsetzen kann. An den Logger können unterschiedlichste Sensoren angeschlossen und deren Daten während dem Flug aufgezeichnet werden. Ausgelesen werden die Daten nach dem Flug mit dem Laptop (oder von SM-Modellbau dem Uni-Display) und können dann in Excel ausgewertet und analysiert werden.
Wir haben das Modell mit folgenden Sensoren ausgestattet:
Um Strom und Spannung zu messen wurde im Rumpf direkt hinter dem Regler ein 150A Shunt (oder 80A, je nach Messung) verbaut.


Da uns der optische Drehzahlsensor nicht zusagte, (Messprinzip und das er nur außerhalb vom Rumpf arbeiten kann) haben wir uns für den Hall-Sensor vom SM entschieden. Dieser sollte komplett integriert unter der Spinnerkappe arbeiten. Leider war der Sensor doch grösser als gedacht bzw. weniger Platz unter den Graupner CNC Spinnern als erwartet ![]() .Also wurde der eigentliche Hall-Sensorkopf von der Platine, auf der die restliche Elektronik platziert ist, abgelötet und dünne Kabel direkt angelötet. Der Sensorkopf wurde mit einem Kohlestab auf dem Motorspant montiert. Die Kabel führen in den Rumpf, wo die Platine positioniert wurde.In der Spinnerkappe wurden kleinere Magnete eingeklebt, da die originalen etwas zu groß waren. Die Magnetkraft ist absolut ausreichend für den Sensor. (ACHTUNG: Hier auf gute Verklebung achten – rotierende Teile!)
.Also wurde der eigentliche Hall-Sensorkopf von der Platine, auf der die restliche Elektronik platziert ist, abgelötet und dünne Kabel direkt angelötet. Der Sensorkopf wurde mit einem Kohlestab auf dem Motorspant montiert. Die Kabel führen in den Rumpf, wo die Platine positioniert wurde.In der Spinnerkappe wurden kleinere Magnete eingeklebt, da die originalen etwas zu groß waren. Die Magnetkraft ist absolut ausreichend für den Sensor. (ACHTUNG: Hier auf gute Verklebung achten – rotierende Teile!)

Um die Fluggeschwindigkeiten auf zu zeichnen wurde das Pitot-Rohr von SM verwendet. Es wurde an der Nasenleiste des Flügels, außerhalb der Propellerströmung montiert. Hier muss auf eine möglichst exakte Ausrichtung zur Flugbahn geachtet werden, da jeder Anstellwinkel/ Seitenzug das Ergebnis verfälscht. Über zwei Schläuche wird der Referenz- und Staudruck in den Rumpf geführt wo der Differenzdrucksensor sitzt.


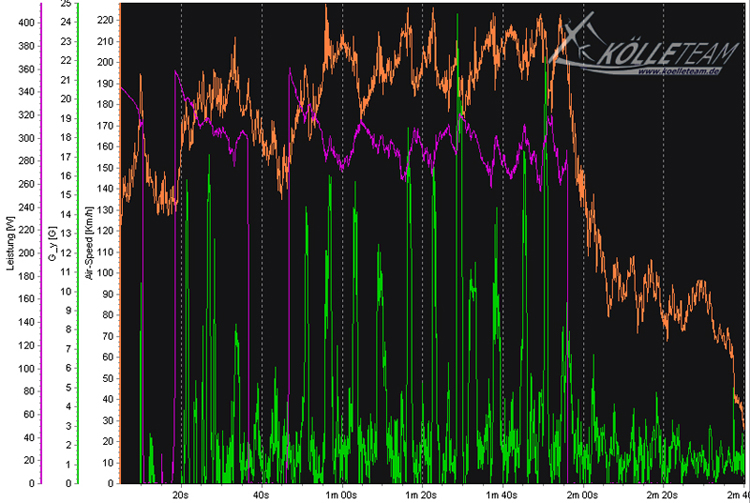
Das Diagram zeigt eine der ersten Messungen im Pylonkurs mit dem Messystem . Eingesetzt wurde ein BK 16L 6 Winder, an einem Grp. Cam Speed Prop 4,7×4,7″ und 9 GP 2200 Zellen.An der Spannungslage kann man eigentlich direkt erkennen, dass diese Messung nicht representativ für diesen Akku ist,da viel zu gering. (Dies kann man Aufgrund der Auflösung auf diesem Ausdruck nur schwer erkennen). Bei richtiger Interpretation der Messergenisse kann man so schnell und „einfach“ Aussagen und Erfahrungen zu der Performance der Antriebskomponenten sammeln.Dieser Akku bricht nach 45 sek ein. Sondermüll….
UPDATE: Eigenbau G-Force Sensor; Um für zukünftige Konstruktionen ein wenig mehr über die Modelle und deren Verhalten zu lernen, habe ich mich entschlossen einen G-Kraft-Sensor zu bauen um das Lastvielfache, welches im Flug auftritt, messen zu können. Leider gibt es für den Unilog keine fertige Lösung, weshalb ich selber zum Lötkolben greifen musste.Den Sensorbaustein, den ich ausgesucht habe, ist ein 2-Achs-G-Sensor. Dieser misst auf der X-Achse +/-100G und auf der Y-Achse +/-50G.
HIER gibt es einen vollständigen Bericht zum Sensor aufbau und Datenauswertung
Von Zeit zu Zeit werden wir sicherlich noch neue Messergebnisse verschiedener Antriebskonzepte im Newsblog veröffentlichen.
Links:
- SM-Modellbau – Hersteller vom Loggersystem
- Kurzanleitung – Kurzanleitung zum Energielimiter auf F5D.org